Контрольная работа по ТАУ в MatLab
ДОМАШНЕЕ ЗАДАНИЕ К ТЕМЕ 10
ВАРИАНТ 1
Выбрать регулятор (закон регулирования) для статического объекта, передаточная функция которого приведена ниже.
Дано:
 ;
;
· Максимально-допустимое значение динамического отклонения регулируемой величины εmax = 9 %;
· Принятый типовой переходный процесс – апериодический переходный процесс;
· Максимально-возможное значение возмущения на объект, выраженное в % хода регулирующего органа Δхвх = 4%.
· Допустимое остаточное отклонение, т.е. статическая ошибка, εст = 5%
· Допустимое время регулирования Тр = 20 сек.
Для упрощения расчетов и исследования характеристик САУ используем рекомендованный пакет прикладных программ Control System Toolbox, который является приложением системы MatLab и ориентирован на решение задач по теории автоматического управления.
Для использования функций Control System Toolbox в первую очередь следует ввести в среду MatLab все полученные ПФ. Наиболее удобно это делать в так называемой tf –форме.
Для создания tf-модели данной ПФ используется функция с одноименным идентификатором
H=tf ( [bm, bm-1, …, b0],[an, an-1,…,a0] ),
где H – имя созданной ПФ, […] – массивы коэффициентов полиномов числителя и знаменателя ПФ.
%Создадим tf-модель объекта управления:
Wou=tf([2.5], [8 1],'inputdelay',4);
% Определим переходный процесс при максимально-возможном значение возмущения на объект, выраженное в % хода регулирующего органа Δхвх = 4%.
step (0.04*Wou) ; grid on
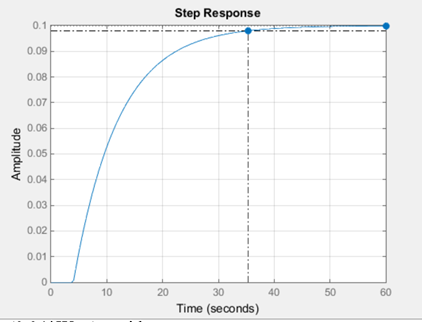
Рис. 1. Переходный процесс исходного объекта.
% Определим качество переходного процесса
stepinfo(0.04*Wou)
ans =
RiseTime: 17.5778
SettlingTime: 35.2975
SettlingMin: 0.0901
SettlingMax: 0.1000
Overshoot: 0
Undershoot: 0
Peak: 0.1000
PeakTime: 80.6826
Переходный процесс удовлетворяет заданным критериям:
· по максимально-допустимому значение динамического отклонения регулируемой величины εmax = 9 %;
· по типу переходного процесса – апериодический переходный процесс;
· по допустимому остаточному отклонению, т.е. статическая ошибка, εст = 0%.
Но не удовлетворяет по допустимому времени регулирования Тр = 20 сек., которое равно 35,2975 с.
Введем корректирующее форсирующее звено и подберем его параметры.
Wkor= tf([7 1], [0 1]);
W=Wou*Wkor;
%W=feedback(Wou, Wpi)
step (0.04*W) ; grid on
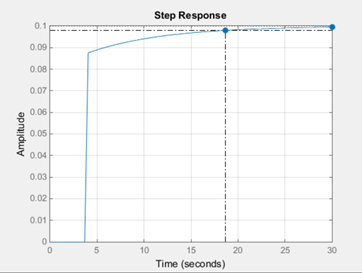
Рис. 2. Переходный процесс скорректированного объекта.
% Определим качество переходного процесса
stepinfo(0.04*W)
ans =
RiseTime: 2.0607
SettlingTime: 18.6626
SettlingMin: 0.0901
SettlingMax: 0.1000
Overshoot: 0
Undershoot: 0
Peak: 0.1000
Таким образом, время переходного процесса уменьшилось до 18.6626 с, что соответствует заданным требованиям.