Расчет динамических нагрузок при вынужденных колебаниях.
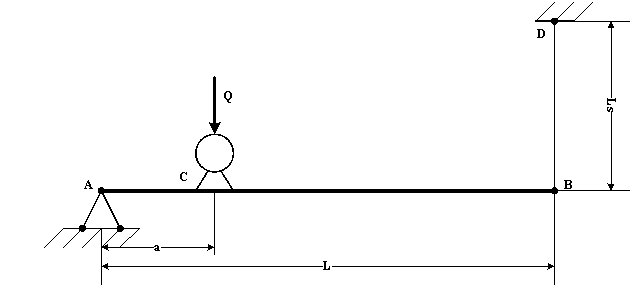
Дано : L=2.6 м ; a/L=0.35 ; Q=100 кН ; P=1.8 кН ; e=0.034 м ; № двутавра 20 ; d=0.017 м ; Ls=1.4 м ; n=600 об/мин ; [σ]=280 МПа.
Требуется определить : 1. Статическое удлинение опорного стержня ;
2. Статическое перемещение и статическое напряжение сечения балки, где находится электромотор ;
3. Частоту вынужденных колебаний системы ;
4. Коэффициент нарастания колебаний в случаях жёсткого опирания балки и упругого опирания ;
5. Найти закон изменения во времени прогиба балки и максимального нормального напряжения в сечении, где находится электромотор при условии установившихся вынужденных колебаний ;
6. Построить график этих функций и определить максимальный динамический коэффициент ;
7. Проверить прочность балки и стержня при допускаемом напряжении [σ]=280 МПа.
Решение.
a=0.35L=0.35×2.6=0.91 м.
По таблице сортамента определим геометрические характеристики двутавра № 20 :
Jx=1840 см4 ; Wx=184 см3 ; F=26.8 см2
1. Найдём статическое удлинение опорного стержня.
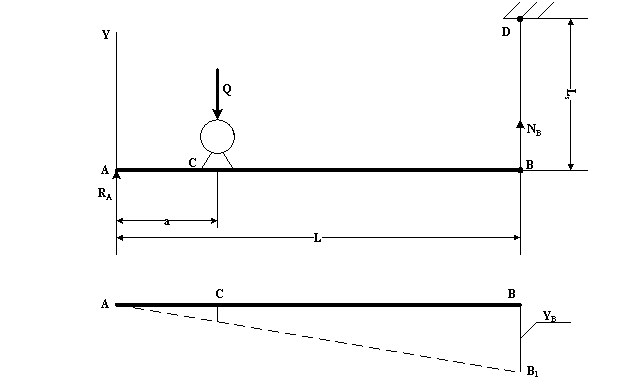
Из уравнений равновесия статики ΣmA=0 и ΣmB=0 найдём опорные реакции в балке AB.
ΣmA=0 ; NBL-Qa=0 , откуда NB=Qa/L=100×0.91/2.6=35 кН
ΣmB=0 ; -RAL+Q(L-a)=0 , откуда RA=Q(L-a)/L=100×(2.6-0.91)/2.6=65 кН
Найдём вертикальное перемещение опоры B за счёт удлинения подвески при растяжении. Конец балки B переместится (точка B1) на величину :
YB=NBLs/(EF) , где F – площадь подвески ; E=2×105 МПа=2×108 кН/м2
F=πd2/4=3.14×0.0172/4=0.0002 м2
YB=35×1.4/(2×108×0.0002)=0.0012 м=1.2 мм.
2. Статическое перемещение и статическое напряжение сечения балки, где находится электромотор.
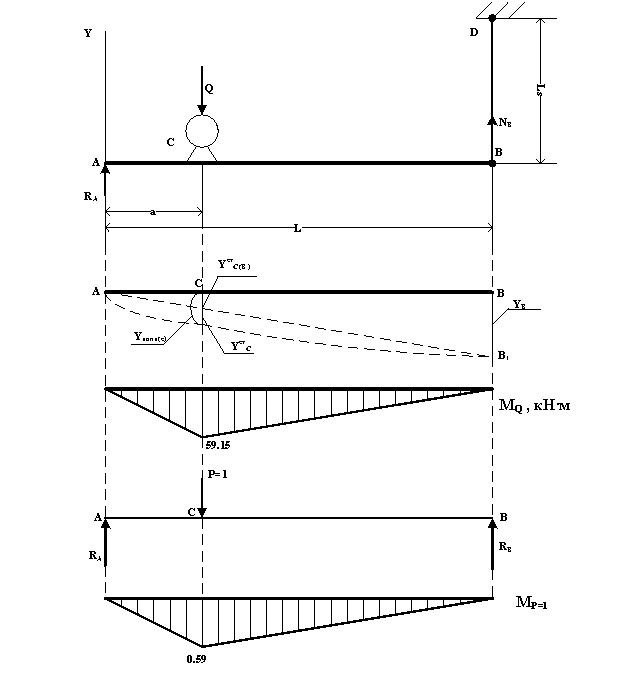
Определим статический прогиб в точке «С» балки AB при условии, что опора B является жёсткой.
Построим эпюру MQ изгибающих моментов от заданной нагрузки.
Изобразим балку AB , нагруженной единичной силой P=1 в сечении С.
Находим реакции опор.
ΣmB=0 ; -RAL+P(L-a)=0 , откуда RA=(L-a)/L=(2.6-0.91)/2.6=0.65
ΣmA=0 ; RBL-Pa=0 , откуда RB=a/L=0.91/2.6=0.35
Строим эпюру изгибающих моментов MP=1 от единичной нагрузки.
MC=RAa=0.65×0.91=0.59
Используя правило Верещагина, найдём перемещение в сечении «С»
YстС=![]() =
=![]()
![]() =
=![]()
![]() =0.004 м=4 мм
=0.004 м=4 мм
Статическое напряжение в сечении «С» балки.
σсст=![]() 161×106 Па=161 МПа.
161×106 Па=161 МПа.
Вычислим величину полного перемещения «С» балки при учёте удлинения подвески по формуле
Yполн(с) =YстС+YстС(B )=YстС+YстBa/L=0.004+0.0012×0.91/2.6=0.004 м.
3. Найдём частоту вынужденных колебаний системы.
Находим частоту собственных колебаний :
при жёстком опирании
ω1=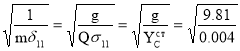 =49.5 1/с
=49.5 1/с
при упругом опирании
ω2= =49.5 1/с
=49.5 1/с
Вертикальная составляющая центробежной силы вызывает поперечные колебания балки в вертикальной плоскости с частотой возмущающей силы.
Θ=πn/30=3.14×600/30=62.8 1/с.
4. Найдём коэффициент нарастания колебаний в случаях жёсткого опирания балки и упругого опирания.
Коэффициент нарастания колебаний при жёстком опирании.
β1= =1.6
=1.6
Коэффициент нарастания колебаний при упругом опирании.
β2= =1.6
=1.6
5. Найдём закон изменения во времени прогиба балки и максимального нормального напряжения в сечении, где находиться электромотор.
Находим амплитудное значение инерционной силы :
P0=Pθ2e/g=![]() ×62.82×0.034=25 кН
×62.82×0.034=25 кН
Закон изменения во времени прогиба балки в месте, где находится электромотор, при жёстком опирании :
ν1(t)=νQ1 м.
м.
при упругом опирании
ν2(t)=νQ2 м.
м.
Период вынужденных колебаний T=2π/θ=2×3.14/62.8=0.1 c
Закон изменения во времени максимального напряжения при изгибе балки в сечении С :
при жёстком опирании :
σ1(t)=σQ
 МПа.
МПа.
при упругом опирании
σ2(t)=161×(1+0.4sin62.8t) МПа.
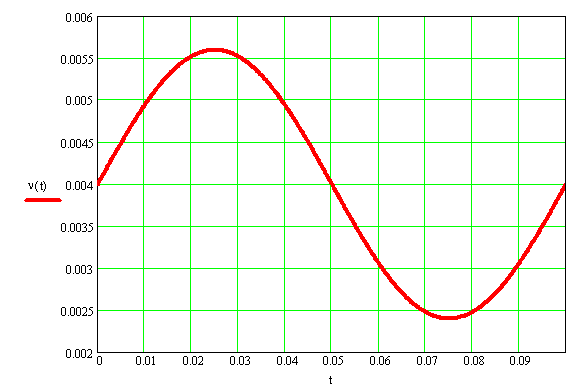
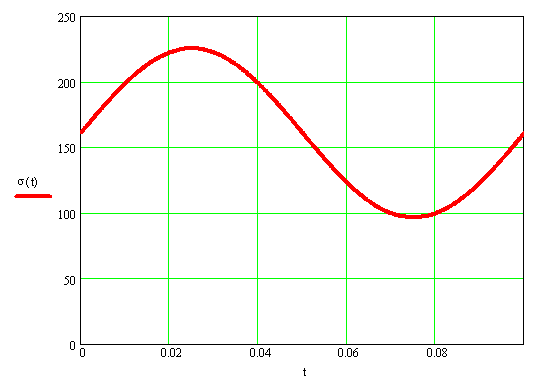
6. Построим графики этих функций и определим максимальный динамический коэффициент.
Для построения графика ν(t) вычисления проводим в табличной форме.
ν(t)=0.004×(1+0.4sin62.8t) м.
|
t, c |
sin62.8t |
0.4sin62.8t |
ν1, м |
|
0 |
0 |
0 |
0.004 |
|
0.025 |
1 |
0.4 |
0.006 |
|
0.05 |
0 |
0 |
0.4 |
|
0.075 |
-1 |
-0.4 |
0.002 |
|
0.1 |
0 |
0 |
0.4 |
Для построения графика σ(t) вычисления проводим в табличной форме.
σ1(t)= 161×(1+0.4sin62.8t) МПа.
|
t, c |
sin62.8t |
0.4sin62.8t |
σ(t), МПа |
|
0 |
0 |
0 |
161 |
|
0.025 |
1 |
0.4 |
225 |
|
0.05 |
0 |
0 |
161 |
|
0.075 |
-1 |
-0.4 |
97 |
|
0.1 |
0 |
0 |
161 |
Коэффициент динамичности
КД=1+P0β/Q=1+25×1.6/100=1.4
Найдём максимальное напряжение в сечении, где находится электромотор :
σmax=σстКД=161×1.4=225 МПа.
7. Проверим прочность балки и стержня при допускаемом напряжении [σ]=280 МПа.
Максимальные напряжения в сечении балки : σmax=225 МПа<[σ]=280 МПа.
Условие прочности соблюдается, причём недонапряжение составляет 20%.
δ=![]() =0.2
=0.2
Максимальное напряжение в сечении стержня :
σmax=NB/F=35×103/0.0002=175×106 Па=175 МПа<[σ]=280 МПа.
Условие прочности соблюдается.
Как видно из расчёта величина прогиба ν и нормальные напряжения σ в сечении балки, где установлен электромотор, оказались одинаковыми, как в случае жёсткого опирания балки, так и в случае упругого опирания балки. Причём при разгоне ротора от нуля до расчётной частоты система проходит момент резонанса (ω<θ ).
Имя файла: sopr8.doc
Размер файла: 674 Kb
Если закачивание файла не начнется через 10 сек, кликните по этой ссылке